Abstract
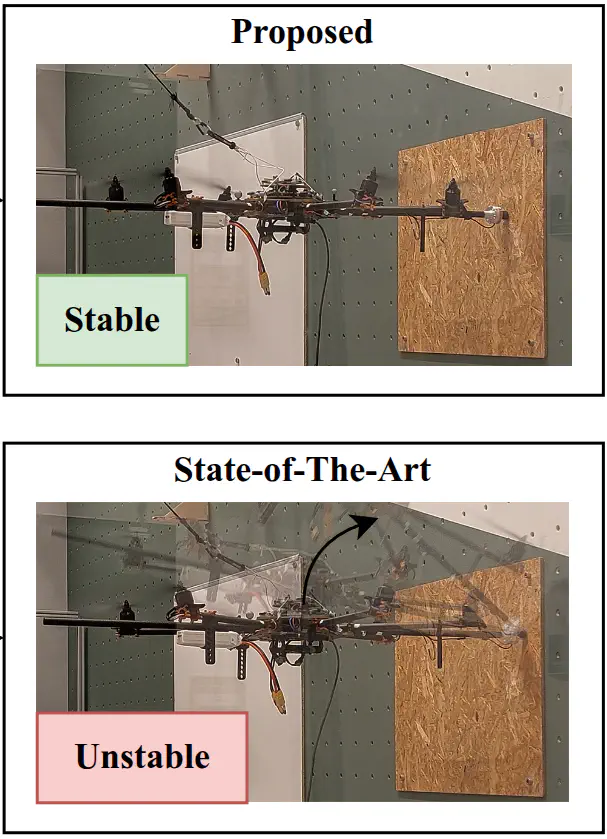
This paper introduces a novel approach for controlling aerial robots during physical interaction by integrating Admittance Control with Nonlinear Model Predictive Control (NMPC). Unlike existing methods, our technique incorporates the desired impedance dynamics directly into the NMPC prediction model, alongside the robot’s dynamics. This allows for the explicit prediction of how the robot’s impedance will respond to interaction forces within the prediction horizon. Consequently, our controller effectively tracks the desired impedance behavior during physical interaction while seamlessly transitioning to trajectory tracking in free motion, all while consistently respecting actuator constraints. The efficacy of this method is validated through real-time simulations and experiments involving physical interaction tasks with an aerial robot. Our findings demonstrate that, across most scenarios, our method significantly outperforms the state-of-the-art (which does not predict future impedance state), achieving a reduction in tracking error of up to 90%. Furthermore, the results indicate that our approach enables smoother and safer physical interaction, characterized by reduced oscillations and the absence of the unstable behavior observed with the state-of-the-art method in certain situations.