Ayham Alharbat
Ayham Alharbat
News
Publications
Talks
Projects
Education
Students
Contact
Light
Dark
Automatic
Model Predective Control
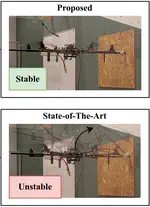
RA-L 2025 - Predictive Admittance Control for Aerial Physical Interaction
This paper introduces a novel approach for controlling aerial robots during physical interaction by integrating Admittance Control with …
A. Alharbat
,
C. Gabellieri
,
A. Mersha
,
A. Franchi
PDF
Code
Project
Video
ICUAS 2022 - Three Fundamental Paradigms for Aerial Physical Interaction Using Nonlinear Model Predictive Control
This paper introduces and compares the three most relevant approaches in which an Aerial Physical Interaction (APhI) control can …
A. Alharbat
,
H. Esmaeeli
,
D. Bicego
,
A. Y. Mersha
,
A. Franchi
Cite
Project
DOI
Cite
×