Ayham Alharbat
Ayham Alharbat
News
Publications
Talks
Projects
Education
Students
Contact
Light
Dark
Automatic
Aerial Robotics
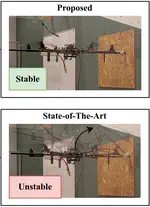
RA-L 2025 - Predictive Admittance Control for Aerial Physical Interaction
This paper introduces a novel approach for controlling aerial robots during physical interaction by integrating Admittance Control with …
A. Alharbat
,
C. Gabellieri
,
A. Mersha
,
A. Franchi
PDF
Code
Project
Video
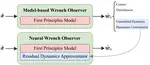
ICUAS 2025 - External-Wrench Estimation for Aerial Robots Exploiting a Learned Model
This paper presents an external wrench estimator that uses a hybrid dynamics model consisting of a first-principles model and a neural …
A. Alharbat
,
G. Ruscelli
,
R. Diversi
,
A. Mersha
PDF
Project
Video
ICUAS 2025 - RL-based Control of UAS Subject to Significant Disturbance
This paper proposes a Reinforcement Learning (RL)-based control framework for position and attitude control of an Unmanned Aerial …
K. Chakraborty
,
T. Hof
,
A. Alharbat
,
A. Mersha
PDF
Project
Video
Multirotor UAV—A Multidisciplinary Platform for Teaching Mechatronics Engineering
D. Kotarski
,
M. Pranjić
,
A. Alharbat
,
P. Piljek
,
T. Bjažić
Cite
Project
DOI
ICUAS 2024 - Sarax: An Open-Source Software/Hardware Framework for Aerial Manipulators
The use of Multi-Rotor Aerial Vehicles (MRAVs) in tasks that require physical interaction has been an active research field in the last …
A. Alharbat
,
D. Zwakenberg
,
H. Esmaeeli
,
A. Mersha
PDF
Cite
Code
Project
Project
Video
ICUAS 2022 - Three Fundamental Paradigms for Aerial Physical Interaction Using Nonlinear Model Predictive Control
This paper introduces and compares the three most relevant approaches in which an Aerial Physical Interaction (APhI) control can …
A. Alharbat
,
H. Esmaeeli
,
D. Bicego
,
A. Y. Mersha
,
A. Franchi
Cite
Project
DOI
TES 2021 - Physical Interacting Aerial Robots for ‘In-Situ’ Inspection and Maintenance of Wind Turbine Blade
Wind turbines are green energy sources that have a great potential in playing a crucial role in mitigating climate change. Regular …
H. Esmaeeli
,
A. Alharbat
,
A. Y. Mersha
Cite
Project
DOI
Cite
×