Three Fundamental Paradigms for Aerial Physical Interaction Using Nonlinear Model Predictive Control
Abstract
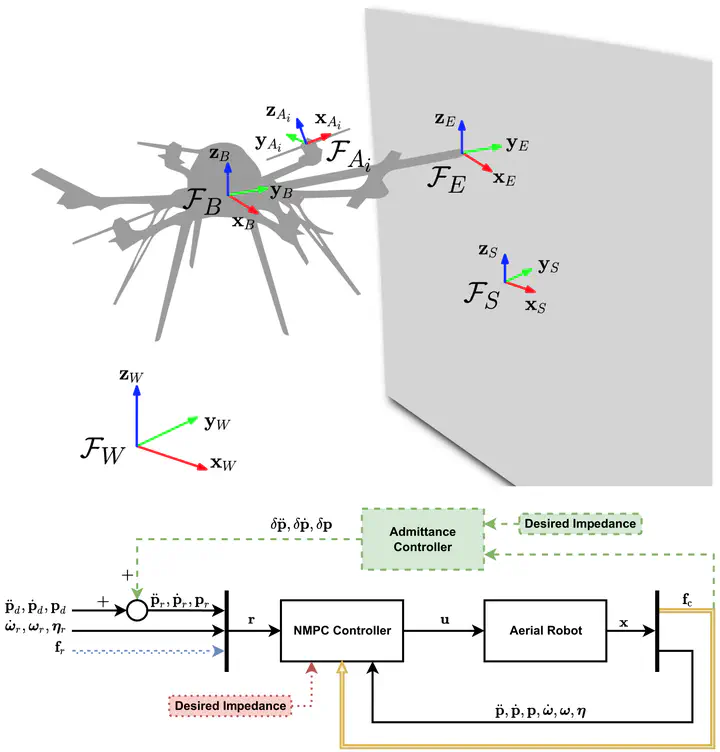
This paper introduces and compares the three most relevant approaches in which an Aerial Physical Interaction (APhI) control can include a Nonlinear Model Predictive Control (NMPC) paradigm in its design. All these methods have the advantage of being able to cope seamlessly with input and state constraints when compared to reactive controllers, however, they substantially differ in the design of the cost function. In the NMPC impedance control the cost function includes the error from the desired impedance dynamics; in the NMPC cascaded control the cost function includes the error from a reference trajectory which is generated online by an admittance filter driven by the force measurement; and in the NMPC hybrid position/force control the cost function contains both the trajectory and direct force error. The three architectures are proposed, implemented, analysed, validated, and compared with real-time simulations of interaction tasks with different environments. The numerical investigation provides a set of insights about the performances, advantages, and dependency on the design assumptions of the three methods.